Robotok tanítása az együttműködésre furcsa új világokban

Robotok tanítása az együttműködésre furcsa új világokban
Hogyan építhetünk robusztus, ellenálló struktúrákat és támogató rendszereket más bolygókon, ahol az erőforrások szűkösek, a kommunikáció nehézkes, és az alkalmazkodóképesség a túlélés kulcsa?
Az Autodesk kutatói együttműködnek a NASA Resilient Extra-Terrestrial Habitat Institute (RETHI) nevű intézetével, hogy olyan kooperatív algoritmusokat fejlesszenek ki, amelyek lehetővé teszik, hogy a robotkollektívák együtt dolgozzanak a tárgyak bolygón kívüli környezetben történő szállításában és manipulálásában. A legfontosabb kutatási kérdésünk az, hogy hogyan érhető el a maximális spontaneitás és a feladatok rugalmassága olyan helyzetekben, amelyekben az ellenőrzött és kiszámíthatatlan környezet, valamint az időszakos vagy nem létező kommunikációs és hálózati infrastruktúra is előfordulhat.
VIDEO
Ehhez a kollektív feladatokat végrehajtó emberi csoportoknál megfigyelhető viselkedésmódokat használjuk ki. Ha egy csoportnak együtt kell dolgoznia egy nehéz bútordarab cipelésén, nem kell előre megmondani nekik a tárgy pontos súlyát, sem a segítő társaik pontos helyét, de még a tervezett útvonalat és a célpontot sem (feltéve, hogy a csoport egyik tagja pontosan tudja, hol van a célpont). A folyamat, amellyel ezt tesszük, meglehetősen kifinomult, és a finomra hangolt neuromuszkuláris jelzések, valamint az ismeretlen tárgyak értékelésében, elemzésében és kezelésében szerzett sokéves tapasztalat kombinációjára támaszkodik.
Amikor az emberek megközelítenek és felvesznek egy tárgyat, azonnal érzékeljük annak alakjára és súlyeloszlására vonatkozó legfontosabb jellemzőket. Ezt felhasználhatjuk arra, hogy döntéseket hozzunk arról, hogyan fog reagálni, amikor megpróbáljuk manipulálni, és összehasonlítva saját erőnkkel és kapacitásunkkal, akár egy biztonságos működési burkolat határait is előrevetíthetjük, amelyen belül tudjuk, hogy teljes mértékben támogatni, stabilizálni és irányítani tudjuk a terhelést. Ha a tárgy nagyon nehéz vagy kiegyensúlyozatlan, akkor ösztönösen úgy reagálunk az ezen a burkon kívüli mozgásra tett kísérletekre, hogy merevebbé tesszük az ízületeinket, nagyobb ellenállási erőt fejtünk ki, és csillapítjuk a teher mozgását, hogy visszahozzuk egy irányítható konfigurációba.
Miután így kialakítottuk egy közös tárgy inerciális jellemzőinek belső modelljét, és egy becslést az irányítható „medencéről”, amelyen belül bízunk abban, hogy képesek vagyunk támogatni és stabilizálni azt, az emberek képesek megérteni egy manipulációs célt, amelyet egyetlen, jól tájékozott vezető közvetít tiszta erő alkalmazásával. Tudat alatt kiszűrjük a terhelés miatt tapasztalt passzív tehetetlenségi erőket, és a vezető szándékát a tárgyon keresztül kifejtett erők és nyomatékok alapján becsüljük meg.
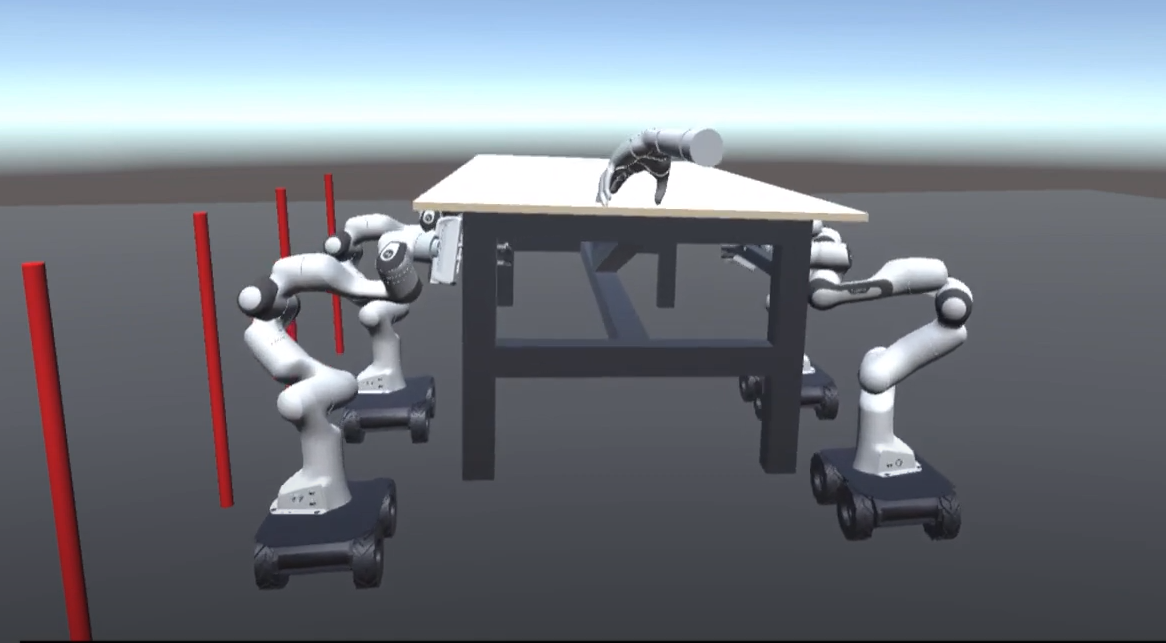
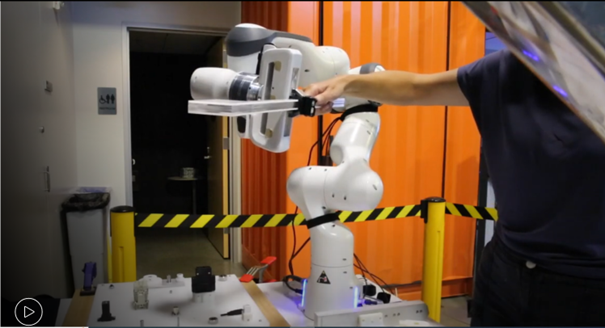
Ahhoz, hogy egy robotot ilyen képességekkel ruházzunk fel, különleges hardveres képességekre van szükség, például erőérzékenységre, hangolható engedékenységre és magas (ideális esetben redundáns) szabadsági fokokra a működési térben. Szerencsére a társrobotok legújabb generációi elkezdték beépíteni ezeket a funkciókat. A robotkollektíva alapegységeként egy készen kapható, kompatibilis társrobot-platformot (Franka Emika Panda) használva olyan keretrendszert fejlesztettünk ki, amely lehetővé teszi, hogy robotok egy csoportja az ember által inspirált érzékelőrendszerek és vezérlő algoritmusok alapján manipuláljon tárgyakat, anélkül, hogy a kollektíva többi tagjának ismerete vagy közvetlen kommunikációja szükséges lenne. A manipulációs térben való vezetés kizárólag a közös terhelésre átvitt erőkön keresztül történik, egyetlen vezető által. A robotok a rendelkezésükre álló kontextuális információk mennyiségének megfelelően képesek a viselkedésükhöz igazodni, miközben biztosítják, hogy a terhelés mindig stabil és irányítható maradjon. Ha például egy robot belső modellje a közös tárgyról gyenge, akkor reaktívan megmerevítheti az ízületeit, amikor a tárgy túl gyorsan kezd mozogni, vagy olyan konfigurációba kerül, ahol az egyes robot nem biztos abban, hogy képes lesz megtartani az irányítást. Alternatívaként egy pontosabb modell nagyobb fokú irányíthatóságot tesz lehetővé több térbeli dimenzióban, lehetővé téve a kollektívának, hogy elforgassa és elforgassa a megosztott terhet az akadályok elkerülése vagy a célhelyzetbe való pontos elhelyezése érdekében.
Mivel az egyes robotok nem ismerik a többiek állapotát és pozícióját (vagy akár azt sem, hogy hány társuk osztozik a feladatban), nagy a valószínűsége annak, hogy a feladat paramétereinek becslése során konfliktusok alakulnak ki - vagy a helyi környezeti feltételek téves összehangolódáshoz és nézeteltéréshez vezethetnek. A hagyományos ipari robotok merev, nem engedékeny ízületekkel nem képesek megoldani az ilyen típusú konfliktusokat, és folyamatos nagysebességű kommunikációt igényelnek annak érdekében, hogy minden résztvevő számára mindig rendelkezésre álljon az összes állapotinformáció, különben a nézeteltérések felmerülésekor kénytelenek lesznek megállni, és újrakonfigurálást és újrahangolást igényelnek, mielőtt újra nekiláthatnának a feladatnak. Az aktívan engedékeny platform használata lehetővé teszi, hogy minden egyes robotnak bizonyos fokú rugalmasságot (vagy "rugalmasságot") adjunk a mozgásában és az ízületek vezérlésében. Ily módon a konfliktusokat el lehet fogadni, és egy adaptív vezérlési folyamat révén, amely megpróbálja minimalizálni ezeket az ellentétes erőket, a robotok fokozatosan összehangolódnak, és konszenzusra jutnak a feladatkörökkel kapcsolatban.
A RETHI és az Autodesk által elképzelt jövőbeli forgatókönyv egy olyan alacsony költségű, mobil robotokból álló "segítő" csapat, amely szükség szerint összevonható vagy szétosztható egy dinamikus, veszélyes, földön kívüli építkezésen vagy épített építményen. Képesek önállóan felmérni és reagálni a helyi körülményekre, miközben egy nagyobb célt szolgálnak, spontán módon képesek bármilyen tárgy szállítására, emelésére vagy beállítására egyetlen vezető irányítása alatt. A következő kutatási lépésünk annak vizsgálata, hogy a kollektíván belül az egyes robotok hogyan használhatják az erőjeleket és az aktív helyi tárgymanipulációt, hogy egy gyenge vagy nem létező tárgymodellről egy pontosabb és precízebb becslés felé mozduljanak el, javítva saját irányíthatóságukat és teljesítményüket még a közös manipulációs feladat során is.
Nic Carey az Autodesk vezető kutató tudósa. Tudjon meg többet erről a folyamatban lévő kutatási projektről